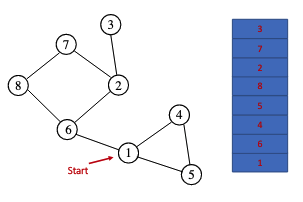
It explores the graph differently from depth-first search.
It considers the neighbouring nodes first:
- All the neighbours at the start node are expanded first.
- Then the neighbours of the neighbours.
- Until the goal state is found.
It is a very expensive search since all the partial paths being considered must be stored.
It will eventually find a path to the goal but it may not be the best path.
It is similar to the exhaustive search but it stops when the goal node is reached.
Visualisation
Breadth-First Search: https://www.cs.usfca.edu/~galles/visualization/BFS.html